









NASA’s ERNEST Rover Redefines Speed and Agility on Rough Terrain
 16
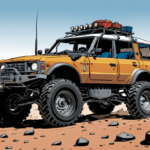
16NASA’s latest rover prototype, ERNEST, just shattered expectations for planetary exploration. It drove 16 miles across harsh desert terrain in just over 37 hours, pushing boundaries on speed and mobility.
ERNEST is a compact, four-wheeled rover, about four feet long, designed to tackle obstacles current Mars rovers avoid. Unlike the six-wheeled Curiosity or Perseverance, ERNEST can lift each wheel independently to climb over rocks and steep slopes. This active suspension system gives it new gaits like squirming and wheel-walking, letting it navigate terrain previously impassable.
Speed is where ERNEST really stands out. It reached 0.6 miles per hour—six times faster than Perseverance’s top speed. That may still sound slow, but on Mars or the Moon, it’s a quantum leap. Current rovers often inch along, spending hours just to cover a few hundred feet. ERNEST’s pace hints at a future where rovers can roam widely without Earth-bound micromanagement.
The rover’s autonomy is no gimmick. ERNEST used onboard AI to plan routes and avoid hazards with minimal human input. It operated through varied lighting conditions, including dusk and nighttime, simulating the long shadows on lunar poles. This level of independence is critical given the communication delays between Earth and these distant surfaces.
ERNEST also features a hybrid suspension system. It can switch between passive mode, which conserves energy, and active mode, which enhances mobility. Engineers tested almost a dozen suspension configurations before settling on this design. The active suspension has just two powered joints in front, articulating a gimbal that lets the wheels move independently.
The rover’s wire mesh wheels add another edge. They grip loose soil and sand better, helping ERNEST crawl up slopes as steep as 35 degrees—far beyond the limits of current Mars rovers. This suggests ERNEST could explore crater floors, steep hills, and other challenging terrains on the Moon and Mars.
Development started in 2022 with small prototypes just two feet long. Engineers tested these in simulated lunar soil, refining the suspension and mobility before scaling up. To teach ERNEST to think on its own, the team used reinforcement learning—a form of AI where the rover learns through trial and error in simulation. Thousands of virtual driving hours prepared it for real-world challenges.
NASA’s goal is clear: build rovers that cover more ground, faster, and with less Earth intervention. ERNEST is a testbed for future lunar and Martian missions that demand long-distance travel across rugged, unpredictable landscapes. It hints at science road trips on the Moon or Mars—exploration that’s more like a journey than a cautious crawl.
In a nutshell, ERNEST tosses aside decades of slow, passive rover design. It rewrites the rules with active suspension, autonomy, and a nimble four-wheel layout. If this prototype scales up successfully, planetary rovers won’t just survive—they’ll thrive on the toughest terrain the solar system throws at them.
Based on
- NASA is testing a rover that can drive faster and lift its wheels to climb obstacles — engadget.com
- NASA Rover Breakthrough Testing Pushes Moon And Mars Exploration Toward Faster, Smarter Travel — dailygalaxy.com
- NASA’s ERNEST: The Next-Gen Rover That’s Faster and Tougher (2026) — ocsoaring.org
- NASA tests advanced capabilities for moon and Mars rovers — techxplore.com
- NASA’s ERNEST Rover Just Completed a 16-Mile Desert Run to Unlock Steeper Routes on the Moon and Mars – TechEBlog — techeblog.com










What do you think?
It is nice to know your opinion. Leave a comment.